Long-lasting battery solution
The case study is based on a real device developed by Acme Systems around the 868MHz YARM module but can be used on any other low power application.
It uses ATMEL SAM L21 one of the less energy hungry, though powerful, 32 bit MCU
Here there are some explanations of the power reducing techniques applicable for this MCUs family
Of course, other sections of the circuit in addition to the MCU must as well be power optimized and switched off when not needed. Eg.: the supply of those sections can be driven with a mosfet through an I/O pin of the MCU enabling other power domains to control.
After reducing the power consumption, we have to optimize the regulators used to adapt the input power to the devices needs. There is no choice, to save energy a switching regulator must be used; but not all the existing buck or boost regulators are optimized to have a good efficiency in low power conditions and a quiescent current compatible with our long lasting needs. We must, infact, keep in mind that most of the time the MCU will be in a more or less deeper sleep mode, where it consumes less than the quiescent current of many "normal" switching regulators. Even when the MCU is running, the absorbed current value falls in a bad zone of the efficiency curve for standard regulators. The Texas Ultra-low-power Step-Down Buck DCDC Converter TPS62740 can supply up to 300mA with a quiescent current of 360nA, meaning that it can be left on forever without draining significant current from the external supply. It has also interesting further features for the low power devices development, an efficiency up to 90% at very low output current, a secondary switchable output to create a second power domain and the output voltage selectable class='acmetable' by software. These last two features are very useful in our specific application and will be detailed below in the circuit description.
Energy source
There are many different chemistries used for the batteries. Each one of them exists for its specific feature that fits the specific need. In our case we need a battery with a good energy density
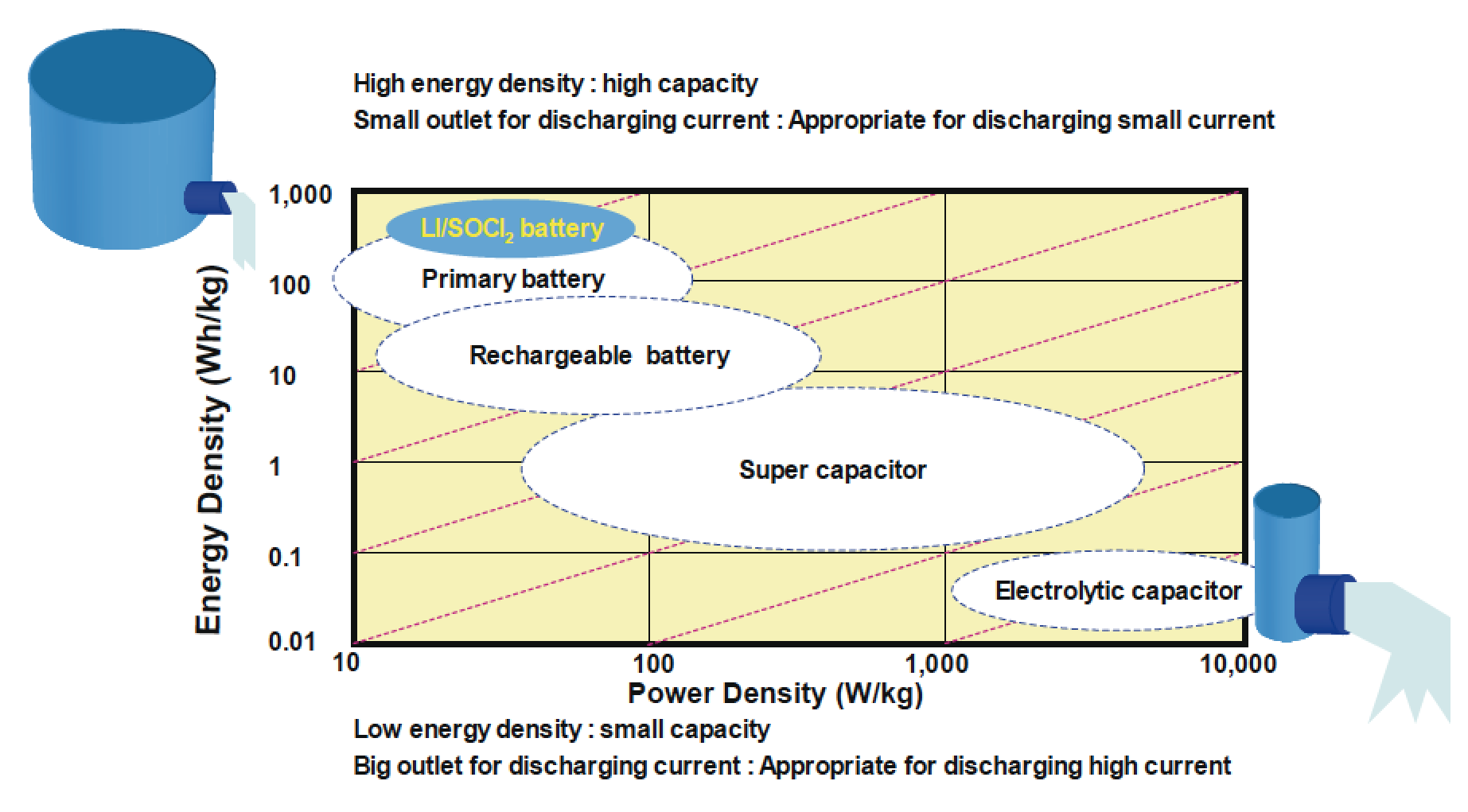
But, first of all, we need batteries with a very low self discharge rate. This automatically excludes secondary (rechargeable) batteries.
Among primary (not rechargeable) batteries there is a good choice range. The Lithium-thionyl chloride (or LTC, or Li-SOCl2) batteries fit most of the requirements for an autonomous device
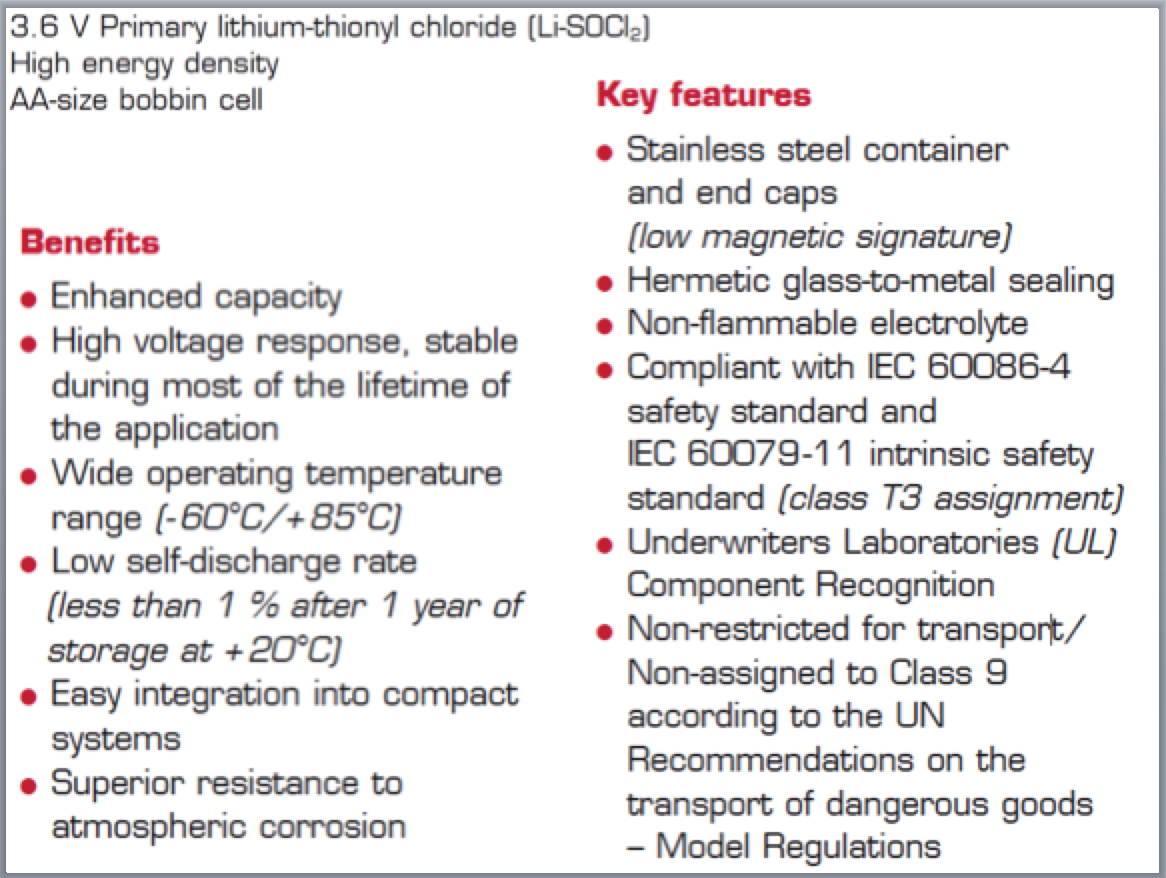
The less than 1%/year self-discharge rate and a up to 15 years and more shelf life and operational life assign to them the first place in our ranking.
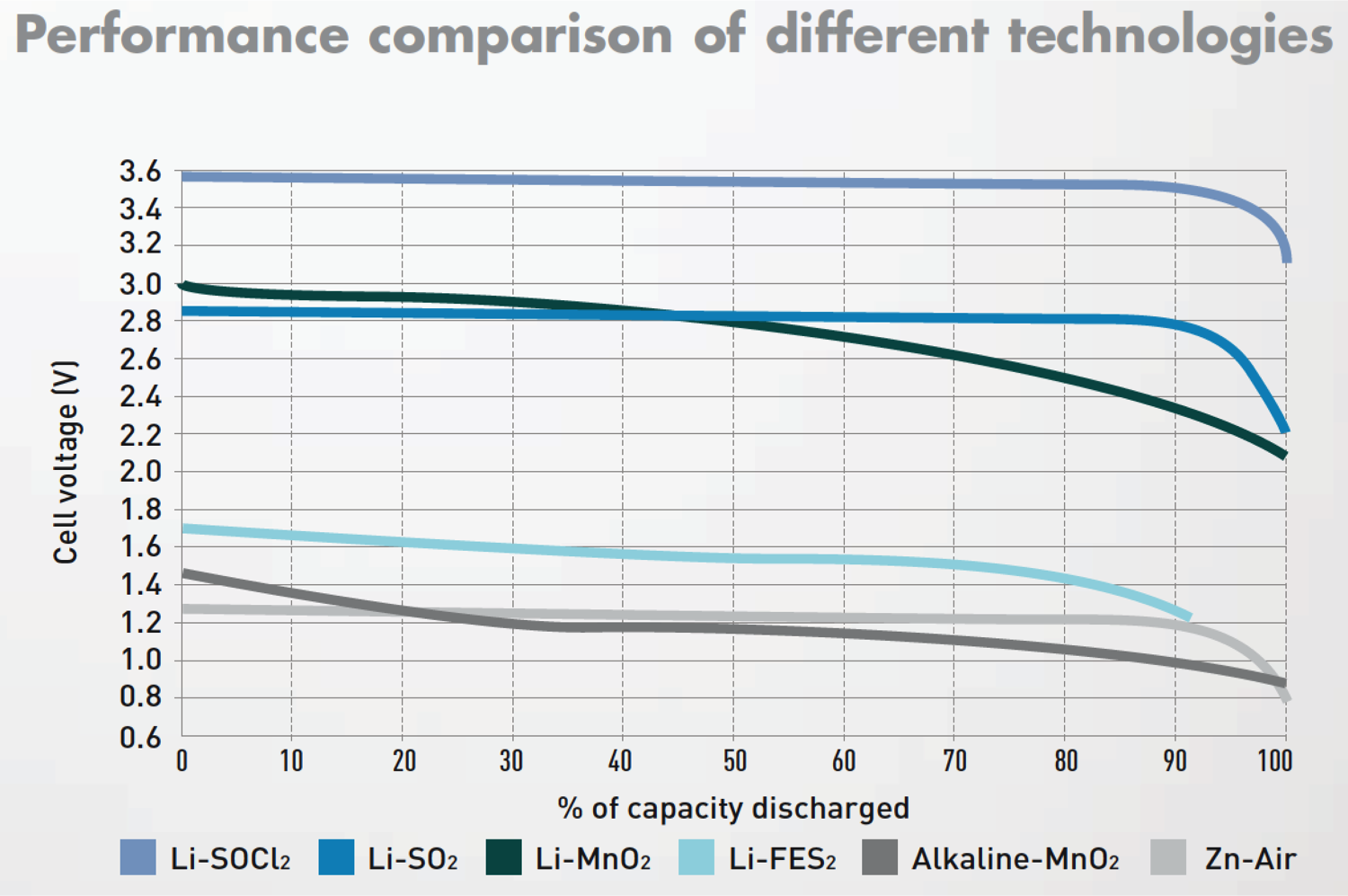
Also the stable class='acmetable' cell voltage during the discharge is a good feature in order to drain all the energy from the source
This kind of technology is stable class='acmetable' and wide spread among many producers, allowing a good choice for price, availability, capacity, different sizes and contacts type.
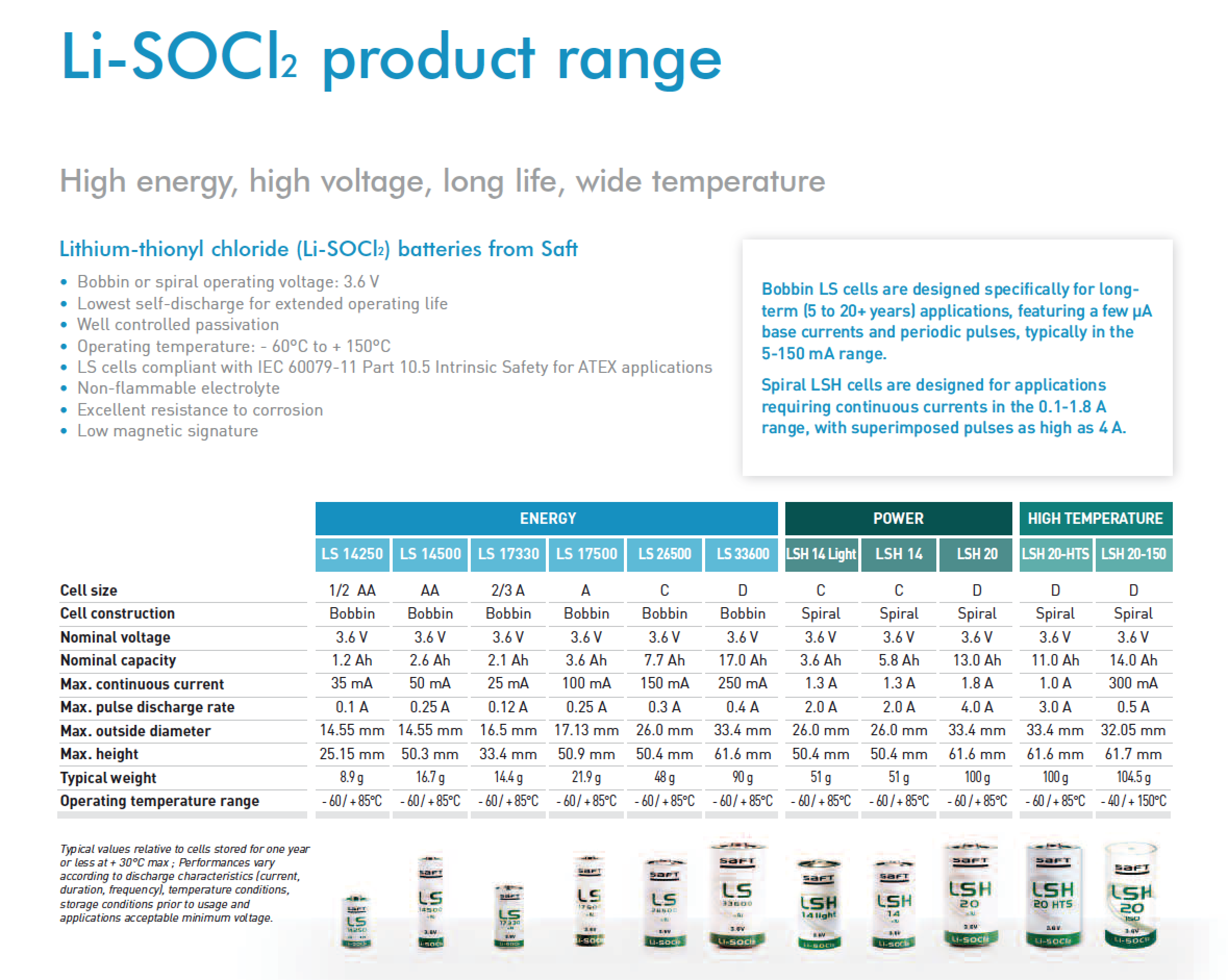
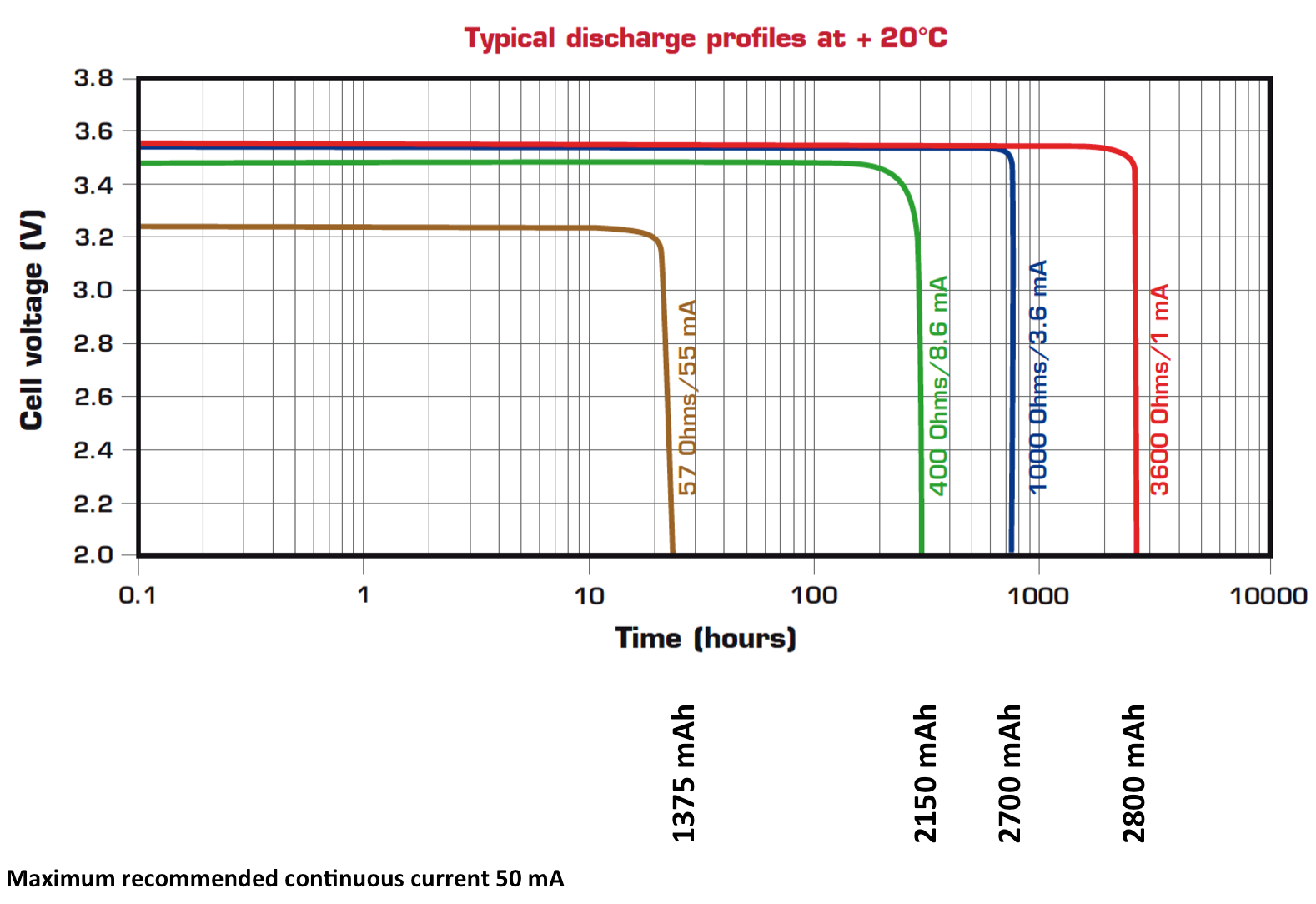
As often happens there is a drawback for this apparently perfect battery: to drain all the theoretical energy from this kind of primary source we must get a low amount of current from them. Also if the maximum admitted current drain is some dozens of mA, we cannot get more than few mA to guarantee a good performance. The graphic below shows how the performance is related to the current absorption.
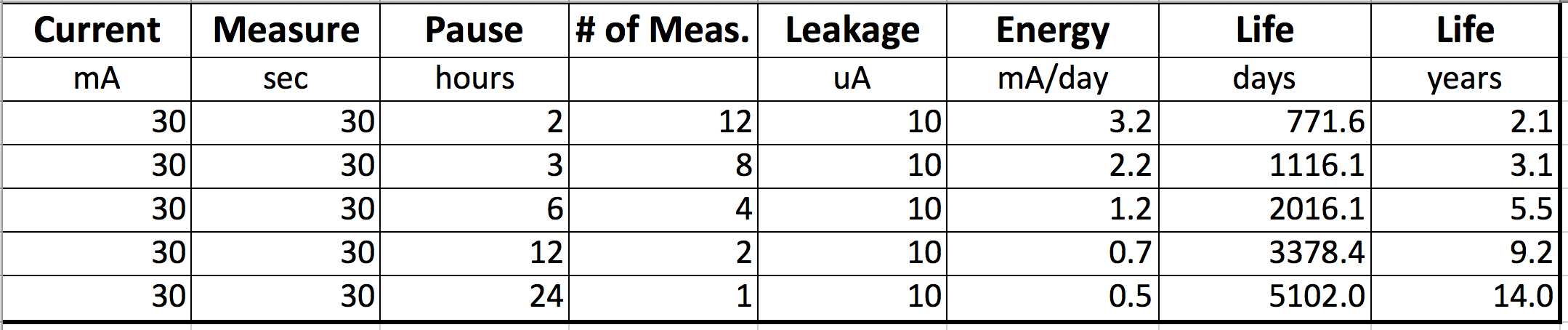
Let's study a solution to solve this issue. In an application such as the one we are discussing about, the system needs to work just a few times a day, for a short period, then it sleeps for a long time. Let's say the MCU wakes it up eight times a day, enables the sensors to read the environment parameters, switch them off again, transmit the computed data to the central system with some kind of wireless system, and go to sleep again. All this can be hypothesized in a consumption of 30mA for a 30" period every 3h and an overall leakage of 10μA for the rest of the day.
All of that leads to the use of a capacitor. Luckily the currently available supercapacitors design have bypassed all the main issues they have had in the past: high Equivalent Series Resistance and high Direct Current Leakage. AVX produces a series of supercaps in a small enough size, at a cheap price, with an ESR range of 300-55mΩ, in a DCL range of 2-70μA from 0.47 to 7.5 Farad.

We now have all the building blocks to design a complete schematic.
The primary LTC battery charges the supercap through a resistor that limits the current to a maximum of 2-3mA in order to use the cell for its full capacity. The capacitor is used to directly supply the programmable step-down regulator. The main Vout supplies the YARM. The YARM MCU controls the output voltage through 4 GPIO from 1.8 to 3.3V in 15 steps. Another GPIO is used to enable the second regulator output when we need to switch on the sensor(s). If the sensors work only with 5V power supply an high efficiency boost converter TPS61070 is planned. Analyzing the schematic we can notice another GPIO which enables, through a mosfet, the resistors divider used to measure the battery charge level. Attaching the resistors to the battery only when needed is another power saving technique. Looking at the discharge curve, someone can argue that it could be hard to find the battery charge level with a so sharply sloped curve at the end of the battery life but, if the X axis spreads for some years, we can imagine to have at least several days to transmit many battery alert messages.
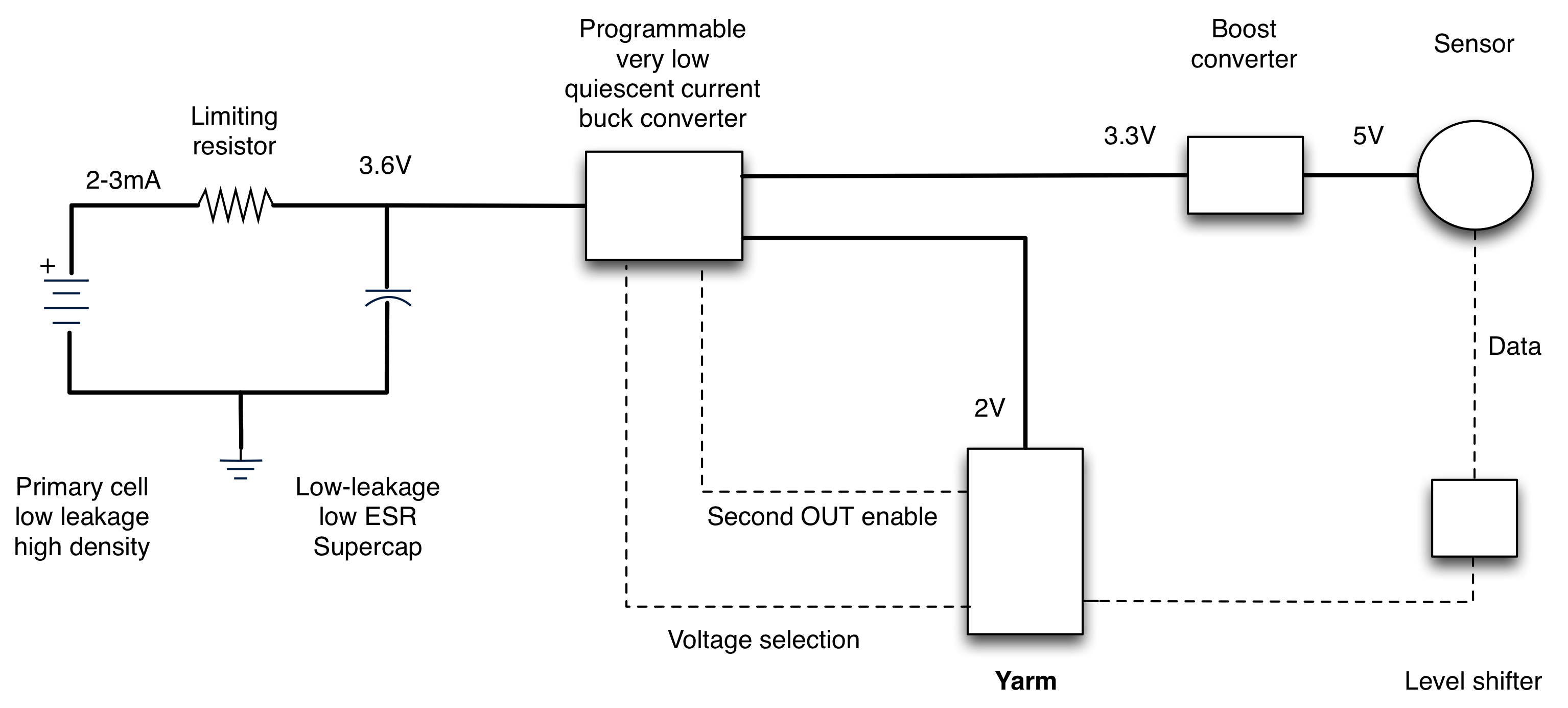
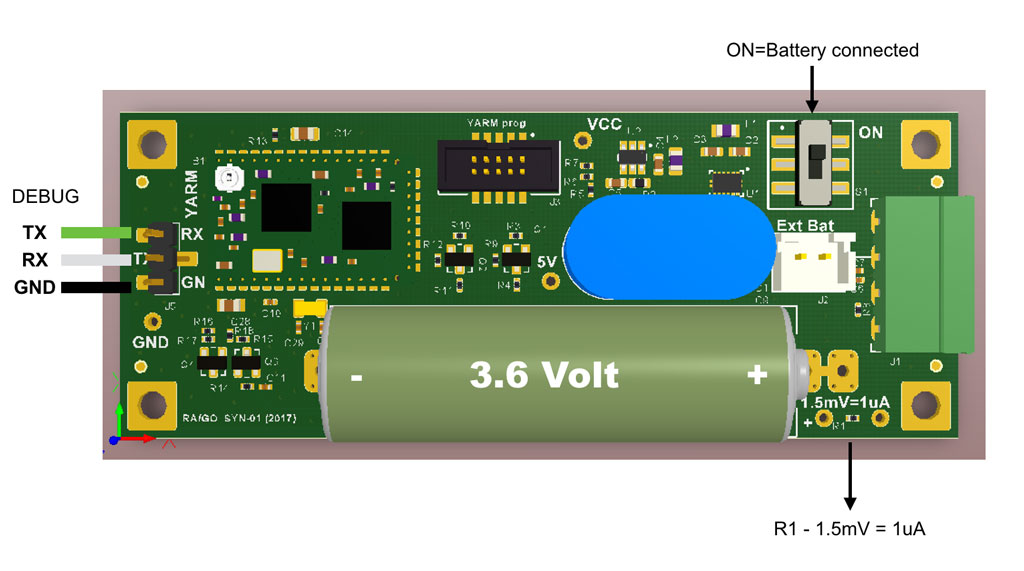
The resulting circuit is shown in the picture below. It can accept 0.47, 1 or 1.5F supercap, according to the power needs.
Supercap choice
Which is the right value for the supercapacitor? It depends upon the usage we are planning. Let's perform some practical tests to parameterize the circuit and orient the choice.
Test set:
- Battery voltage = 3.6V
- Limiting resistor = 1kΩ
- Supercap = 1F
- Load resistance = 120Ω
The test has been carried out using UltraDMM software. This can collect the values taken from a UNI-T UT61E serial connected multimeter and log them in a spreadsheet with timestamp
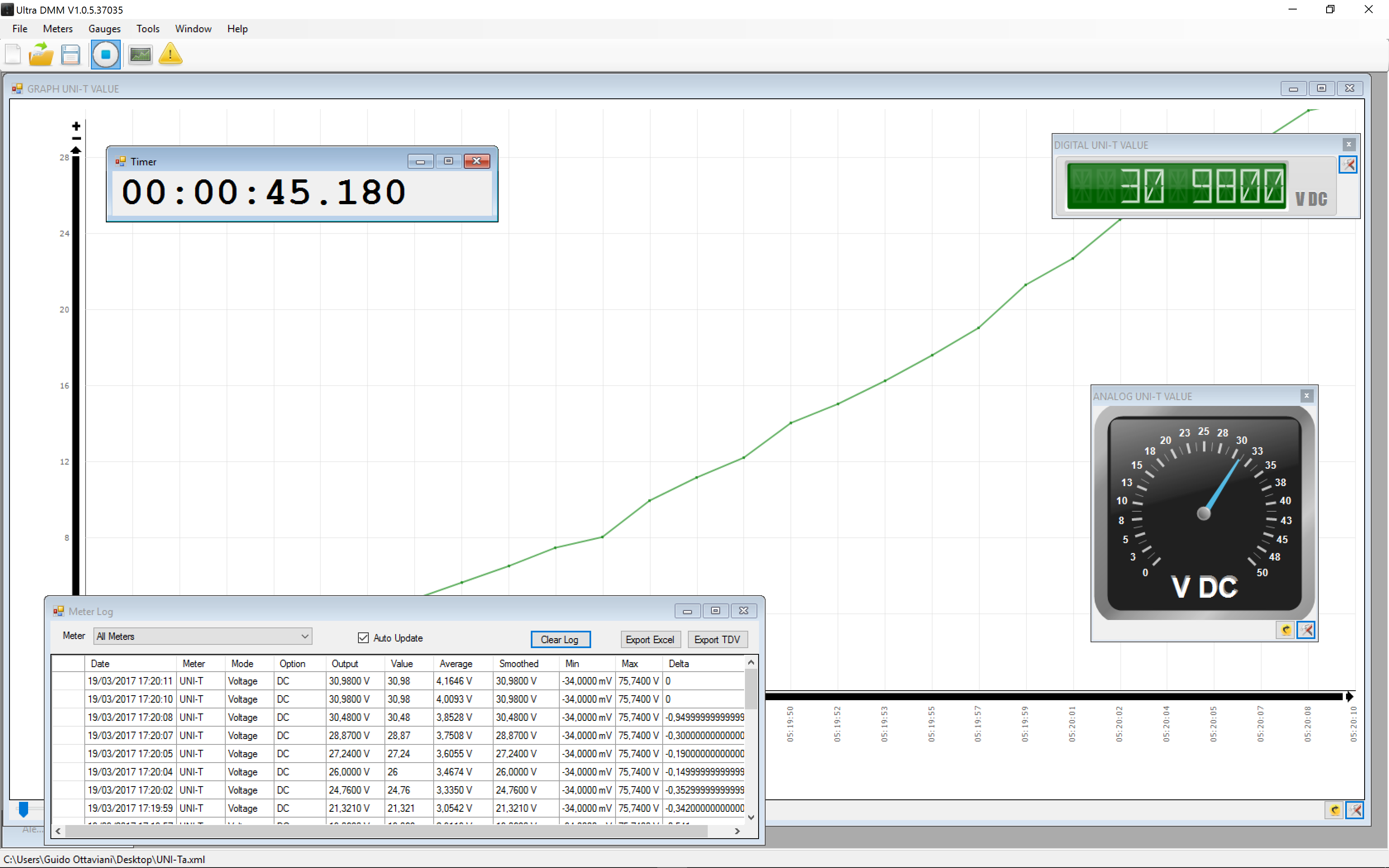
The test set
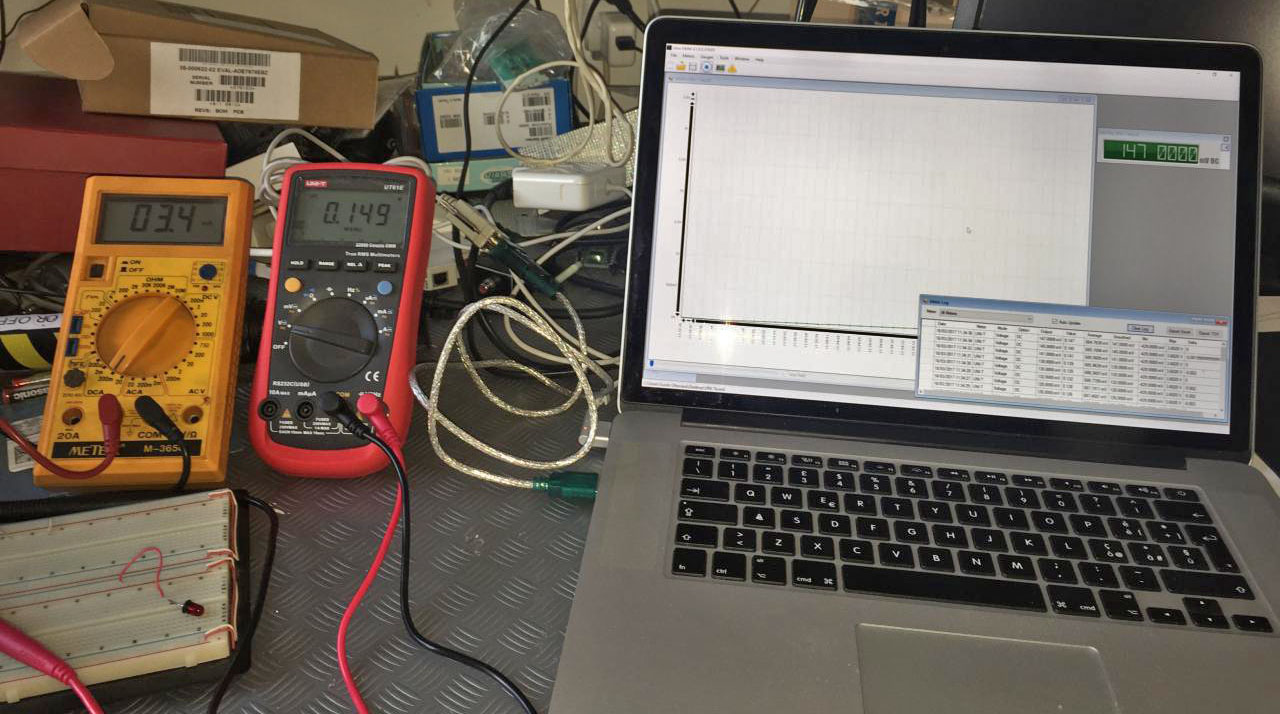
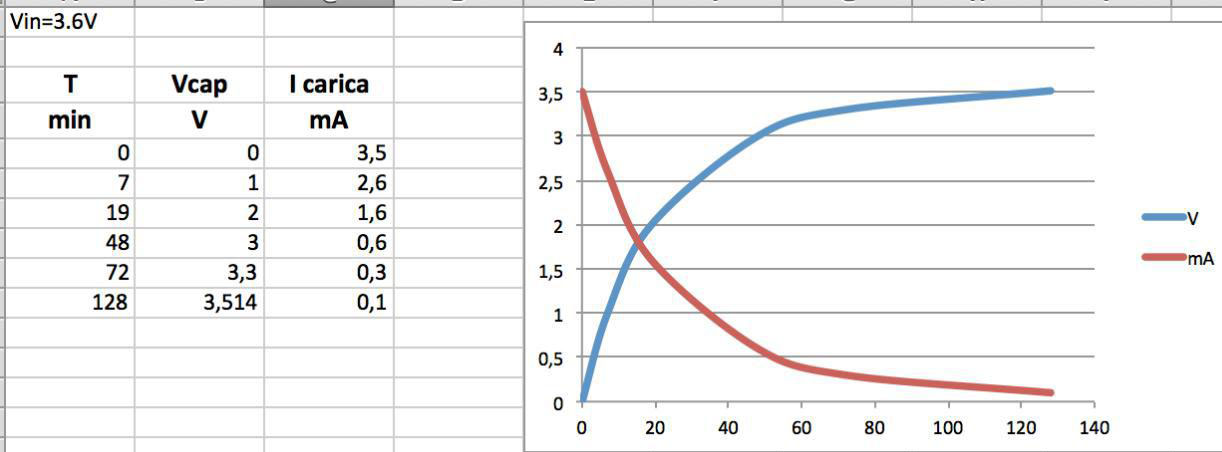
The first parameter to find is the time the capacitor needs to be full charged and which maximum current is drained from the battery. The charts below show a current of about 3mA for the first few minutes (right for the battery life) and a full charge time of about two hours (good to have a maximum of 12 measurements a day).
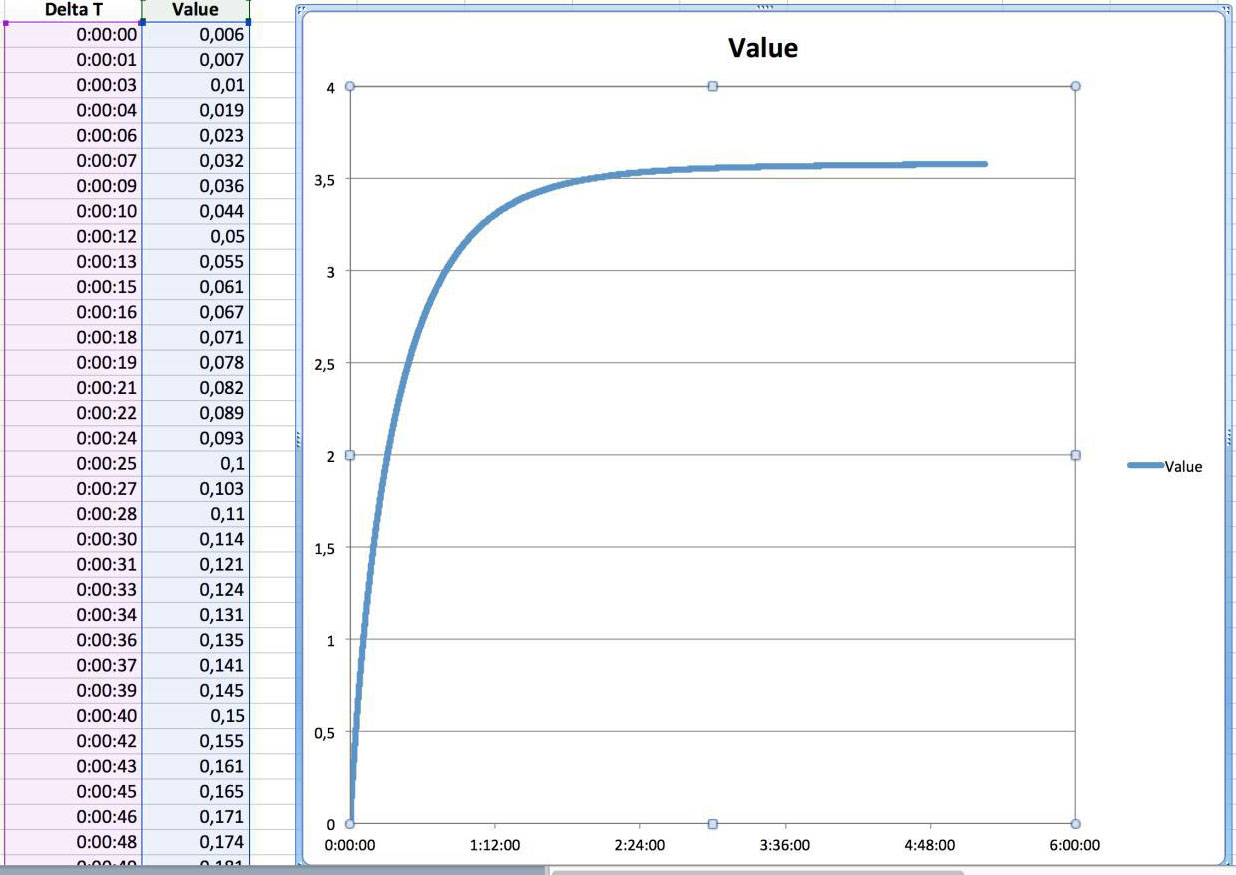
A more detailed chart about charging time.
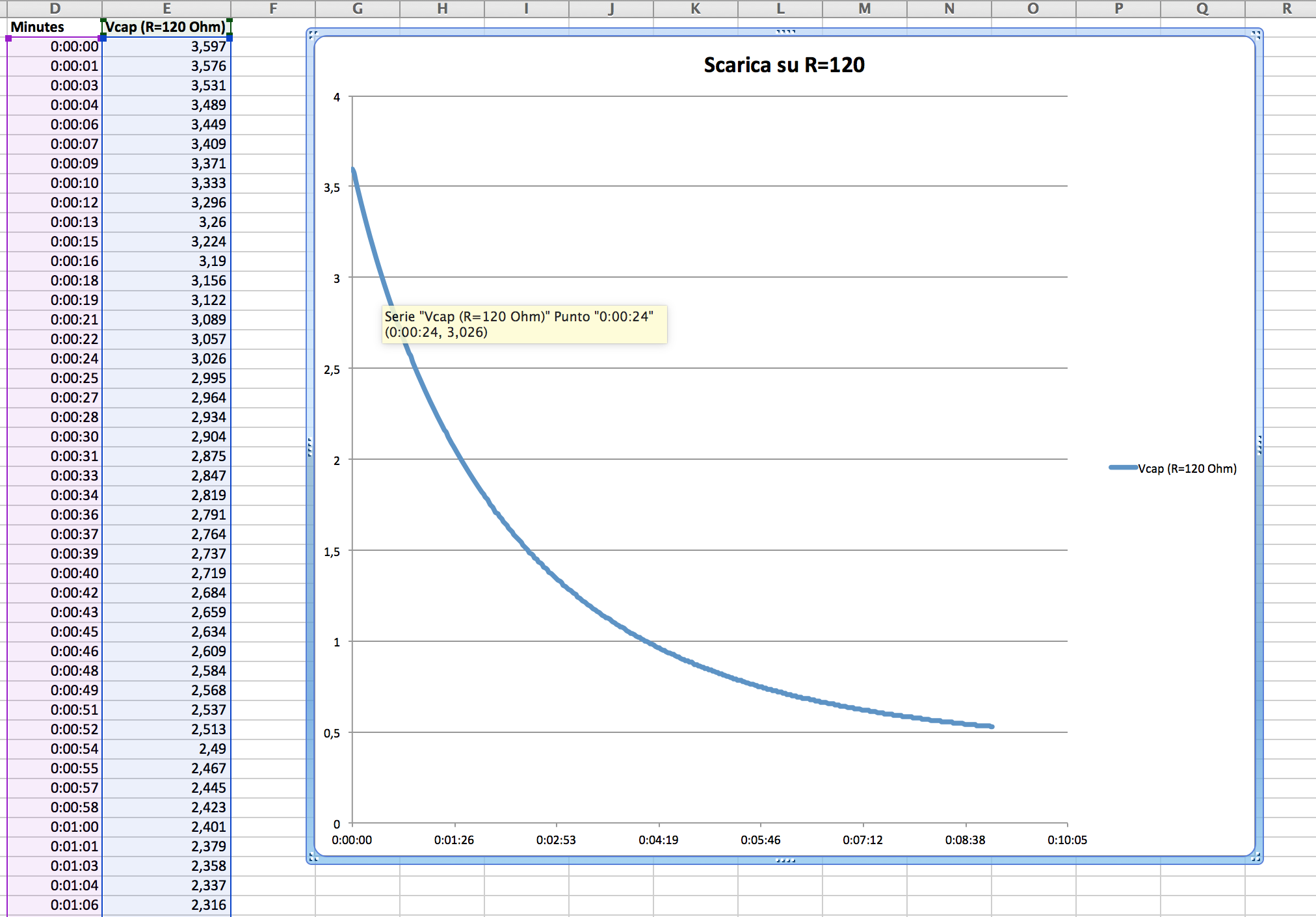
This graph is related to a discharge on a 120Ω resistor (about 30mA). We can read the parameters we need: the supercap can supply 30mA for 24" before going down to 3V and for 1' before 2V. As aforementioned, this explains the reason of the choice for a voltage selectable class='acmetable' regulator. If we select Vout=2V, the current drained from the capacitor is less because of the conversion factor on the switching regulator. Furthermore we have more time before the Vcap goes below the threshold.
| Vin | Vout | I load | Efficiency | I cap |
|---|---|---|---|---|
| 3.6V | 3.3V | 30mA | 0.9 | 24.75mA |
| 3.6V | 2V | 30mA | 0.9 | 15mA |
Because most of the devices can work with a 2V supply, we are able to choose the best compromise beetwen performances and duration. Inversely, keeping the duration of the measure we can decrease the pause period and increase the measurements frequency.
And now the conclusions. The table class='acmetable' below shows a calculated duration of the battery in some different conditions. A more accurate estimation can be done only knowing the exact time, current, pauses, etc. in a specific application. The duration may also vary due to the environmental temperature, which may heavily affect the characteristics of the battery and of the supercap. But now we know that through a correct fine tuning of the software we can achieve the goal of some years of autonomous operational life.
Of course the same basic principles can be applied changing the source with one capable to supplying only few costant mA or with an inconstant energy flow. The supercap stores the energy in a long time period and gives it back to the device in a peak.
Related links
- Yarm based thermo-hygrometer schematic
- Saft battery information sheet
- Saft Primary LTC battery LS14500 datasheet
- Saft LTC battery selector guide
- Maxell LTC battery
- Varta LTC battery
- Tadiran TL-4903 battery
