FOX AHRS - Attitude and Heading Reference System
by Federico Lolli federicololli@hotmail.com
An AHRS (Attitude and Heading Reference System), sometimes wrongly called IMU (Inertial Measurement Unit), provides 3D orientation integrating data coming from inertial gyroscopes, accelerometers, magnetometers.
Integration drift is compensated for by reference vectors, namely gravity and the earth magnetic field. This results in a drift-free orientation, making an AHRS a more cost effective solution than conventional high-grade IMU's, that only integrate gyroscopes and rely on a very high bias-stability of the gyroscopes.
FOX AHRS is a small size and low weight measurement unit, excellent for control and navigation of (un)manned systems and other equipments.
The FOX AHRS is a GPS aided MEMS based Inertial Measurement Unit (IMU) and static pressure sensor. It delivers unprecedented performance for its size, weight, cost and low complexity in use.
It was designed to be the most versatile IMU and AHRS platform available. Its host of on-board sensors, algorithms, real-time communication via USB device port and Ethernet. The on-board SD card, real-time clock/calendar and motion trigger wake up also make the FOX AHRS an ideal standalone data logger.
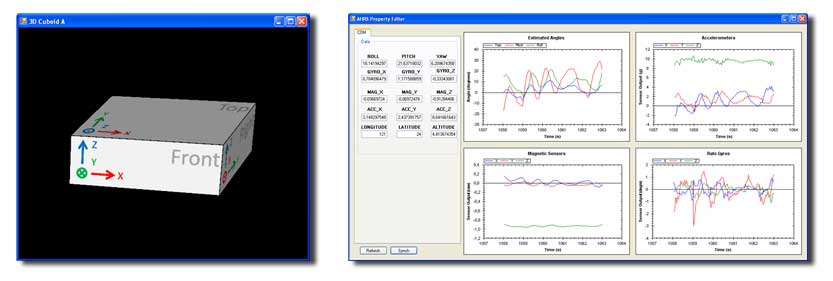
A window based AHRS graphic user interface can be used to configure, shows real-time measurements and export data to othet softwares as like as Microsoft Excel, Matlab, etc.
Output
- 3D Orientation (360°)
- 3D Position
- 3D acceleration, 3D rate of turn, 3D magnetic field
On-board sensors
- Digital triple axis accelerometer magnetometer and gyroscope
- Digital-output X, Y, and Z-Axis ±2g ±4g ±8g dynamically selectable class='acmetable' full-scale acceleration
- Digital-output X, Y, and Z-Axis angular rate sensors (gyros) on one integrated circuit with a range of 250/500/2000 °/sec
- Digital-output X, Y, and Z-Axis ±0.88/1.33/1.9/2.5/4.0/4.7/5.6/8.1Ga dynamically selectable class='acmetable' full-scale magnetometer
- Fast and low noise 10hz GPS
- Digital pressure sensor 0.03hPa (resolution 0.25m) ultra high resolution
- Fast Mode I2C (400kHz) and serial interface
- 16 bit data output ADCs provide simultaneous sampling of gyros and acceleration while requiring no external multiplexer
- 10000 g high shock survivability
- Enhanced bias and sensitivity temperature stability reduces the need for user calibration
- RoHS and Green compliant
On-board algorithms
- IMU and AHRS algorithms provide real-time measurement of orientation relative to the Earth
- Internal states updated at 256 Hz
- Selectable class='acmetable' kalman filtering algorithms
- Open source code and algorithms
Connectivity
- USB
- ethernet
- Micro SD card
- UART
Power options
- USB
- LiPo battery
- External source from 5V
AHRS GUI Software
The AHRS GUI (Graphical User Interface) provides interface to all features and functionality of the FOXAHRS USB. The AHRS GUI is open source and so is intended to serve as a comprehensive template for those using the AHRS to develop their own applications
Features
- Real-time 2D and 3D data graphics
- Data logger for exporting data; e.g. to MATLAB, Microsoft Excel, etc.
Kalman filtering
Using gyroscopes, accelerometers and magnetometers does not yet provide a stable class='acmetable' orientation. In order to cope with transient accelerations, magnetic disturbances and vibrations, it is needed to fuse the data of all sensors in a Kalman filter. The Kalman filter can be tuned in different ways, depending on the application where the AHRS is used in. To accommodate the best performance, The fox ahrs offers different type of kalman filter tuned for the customer's application.
MEMS AHRS's as a replacement for high-grade IMU's?
The world of orientation sensing has long been dominated by high-grade IMU's, commonly used in ships (notably submarines), aircraft and ground defense applications. The price of these high-grade IMU's (e.g Honeywell, Sagem, Northrop Grumman/Litef IMU's) were prohibiting the use of orientation sensors in the smaller scale applications, such as antenna stabilization, small unmanned vehicles and remotely operated submarines (ROV's). The current state of technology in MEMS AHRS's makes it possible though to replace expensive IMU's with these intelligent MEMS AHRS's in selected applications. It also makes the use of orientation sensors possible where an orientation sensor had not been considered before.
Related links
- Federico Lolli's GitHub repository with the source code of FOX AHRS system
- DAISY-7 product description
- FOX Board G20 product description
