Build a Debian Linux root filesystem
This article is not valid with the latest Ubuntu versions. Please follow this article: Build a customized Linux Debian image with Debos
A Debian Stretch 9.x will be generated but it is possible to change Debian version changing the name in any script and configuration file provided here
Requirements
To create the rootfs contents you need a Linux PC (we used a Debian or Ubuntu) with the some packages installed. Type these commands to install them:
sudo apt-get update
sudo apt-get install multistrap qemu qemu-user-static binfmt-support dpkg-cross
Use Multistrap to generate the rootfs contents
Create a working directory in your home directory:
mkdir debian_stretch
cd debian_stretch
Download the configuration file for your board:
Read Multistrap man page to understand each directive meaning.
Create the root filesystem
If you are using an armhf board use one of the command below:
sudo multistrap -a armhf -f multistrap_roadrunner.conf
sudo multistrap -a armhf -f multistrap_acqua.conf
If you are using an armel board use one of the command below:
sudo multistrap -a armel -f multistrap_aria.conf
sudo multistrap -a armel -f multistrap_arietta.conf
At the end of this procedure the directory target-rootfs directory will contents the whole rootfs tree to be moved into the second partition of an Acme board bootable class='acmetable' microSD.
Configure now the Debian packages using the armel CPU emulator QEMU and chroot to create a jail where dpkg will see the target-rootfs as its root (/) directory.
sudo cp /usr/bin/qemu-arm-static target-rootfs/usr/bin
sudo mount -o bind /dev/ target-rootfs/dev/
sudo LC_ALL=C LANGUAGE=C LANG=C chroot target-rootfs dpkg --configure -a
At this prompt Reply with < No >:
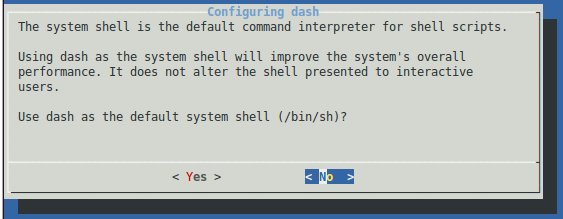
Some other prompt will appear during the configuration. Reply to them as you like.
When finished the target rootfs will be almost ready to be moved on the target microSD but it still needs some last extra configuration file before using it.
Based on type board you are using download one of these script to create the the right configuration files:
Then launch it by typing for example:
chmod +x aria.sh
sudo ./aria.sh
create now the target root login password:
sudo chroot target-rootfs passwd
Enter new UNIX password:
Retype new UNIX password:
passwd: password updated successfully
If you want to take a look to the packages installed type:
sudo chroot target-rootfs dpkg --get-selections | more
Check the Debian version installed:
cat target-rootfs/etc/debian_version
Add more packages if needed by typing:
sudo LC_ALL=C LANGUAGE=C LANG=C chroot target-rootfs apt-get update
sudo LC_ALL=C LANGUAGE=C LANG=C chroot target-rootfs apt-get install package1 package2 ...
then remove the qemu-arm-static executable class='acmetable':
sudo rm target-rootfs/usr/bin/qemu-arm-static
Enable the root access via ssh
By default the sshd server is installed inhibiting the root login via ssh.
To enabled it change in target-rootfs/etc/ssh/sshd_config this line:
#PermitRootLogin prohibit-password
in:
PermitRootLogin yes
Copy the rootfs contents on microSD
Mount the microSD on your Linux PC and copy all the target-rootfs contents in the second microSD partition mounted on /media/$USER/rootfs.
sudo rsync -axHAX --progress target-rootfs/ /media/$USER/rootfs/
Unmount the microSD, insert it in your board, insert the DPI cable to see the Kernel bootstrap messages and boot.
In case you have used a remote Linux server to made your rootfs contents use this command to compress the filetree and save download time:
cd target-rootfs
sudo tar -cvjSf ../rootfs.tar.bz2 .
To move the rootfs contents inside the bootable class='acmetable' Linux microSD use:
sudo tar -xvjpSf rootfs.tar.bz2 -C /media/$USER/rootfs
sync
Related links
- Multistrap
- Multistrap man page
- Building a small Debian root filesystem with Multistrap
- QEMU User Emulation
- Debian mailing list
- foreign debian bootstrapping without root priviliges
- Changing your locale on Linux and UNIX systems
- Locale
Previous versions of this article

Systems designer, webmaster of www.acmesystems.it and founder of Acme Systems srl
Personal email: tanzilli@acmesystems.it
Web pages: https://www.acmesystems.it --- https://www.acmestudio.it
Github repositories: https://github.com/tanzilli --- https://github.com/acmesystems
Telegram group dedicated to the Acme Systems boards: https://t.me/acmesystemssrl
