Roadrunner technical documentation
ISC Image Sensor Controller (Camera)
This page describes how to configure and use of the ISC port on Roadrunner SOM.
Tested on Linux Kernel 5.15
Hardware used
Omnivision OV5640 camera
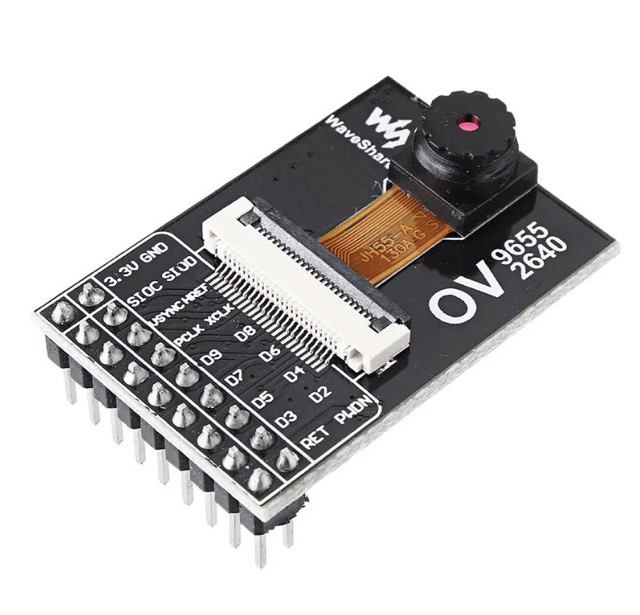
Wirings
| Signal | SAMA5D2 pin | Camera pin |
|---|---|---|
| ISC_D4 | PB30 | D2 |
| ISC_D5 | PB31 | D3 |
| ISC_D6 | PC0 | D4 |
| ISC_D7 | PC1 | D5 |
| ISC_D8 | PC2 | D6 |
| ISC_D9 | PC3 | D7 |
| ISC_D10 | PB24 | D8 |
| ISC_D11 | PB25 | D9 |
| ISC_VSYNC | PC5 | VSYNC OUT Active High Frame Valid; indicates active frame |
| ISC_HSYNC | PC6 | HREF OUT Active High: Line/Data Valid; indicates active pixels |
| ISC_MCK | PC7 | XCLK INP Master Clock into Sensor |
| ISC_PCK | PC4 | PCLK OUT Pixel Clock output from sensor |
| TWCK1 | PD5 | SIOC I2C Clock |
| TWD1 | PD4 | SIOD I2C Data |
| PB11 | PB11 | RST INP Sensor reset signal, active low |
| PB12 | PB12 | PWON INP Power down input, active high |
| 3V | 3.3V | |
| GND | GND |
Linux driver
Device Drivers --->
<*> Multimedia support --->
Media drivers --->
[*] V4L platform devices --->
<*> ATMEL Image Sensor Controller (ISC) support
<*> ATMEL eXtended Image Sensor Controller (XISC) support
<*> ATMEL Image Sensor Interface (ISI) support
Media ancillary drivers --->
<*> OmniVision OV5640 sensor support
Device tree and defconfig
definitions inside apb section:
//********************
// Camera ISC Port
//********************
/* Omnivision OV5640 (5Mpixel) */
i2c1: i2c@fc028000 {
#address-cells = <1>;
#size-cells = <0>;
pinctrl-names = "default","gpio";
//pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1_default>;
pinctrl-1 = <&pinctrl_i2c1_gpio>;
i2c-analog-filter;
i2c-digital-filter;
i2c-digital-filter-width-ns = <35>;
sda-gpios = <&pioA PIN_PD4 GPIO_ACTIVE_HIGH>;
scl-gpios = <&pioA PIN_PD5 (GPIO_ACTIVE_HIGH | GPIO_OPEN_DRAIN)>;
status = "okay";
ov5640: camera@3c {
compatible = "ovti,ov5640";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_sensor_power &pinctrl_sensor_reset>;
reset-gpios = <&pioA PIN_PB11 GPIO_ACTIVE_LOW>;
powerdown-gpios = <&pioA PIN_PB12 GPIO_ACTIVE_HIGH>;
clocks = <&isc>;
clock-names = "xclk";
assigned-clocks = <&isc>;
assigned-clock-rates = <25000000>;
status = "okay";
port {
ov5640_0: endpoint {
remote-endpoint = <&isc_0>;
bus-width = <8>;
data-shift = <2>;
hsync-active = <1>;
vsync-active = <1>;
pclk-sample = <1>;
};
};
};
};
isc: isc@f0008000 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_isc_base &pinctrl_isc_data_8bit>;
status = "okay";
port {
isc_0: endpoint@0 {
remote-endpoint = <&ov5640_0>;
bus-width = <8>;
data-shift = <2>;
hsync-active = <0>;
vsync-active = <0>;
pclk-sample = <1>;
};
};
};
definitions inside pinctrl@fc038000 section:
pinctrl_isc_base: isc_base {
pinmux = <PIN_PC4__ISC_PCK>,
<PIN_PC5__ISC_VSYNC>,
<PIN_PC6__ISC_HSYNC>,
<PIN_PC7__ISC_MCK>;
bias-disable;
};
pinctrl_isc_data_8bit: isc_data_8bit {
pinmux = <PIN_PB25__ISC_D11>,
<PIN_PB24__ISC_D10>,
<PIN_PC3__ISC_D9>,
<PIN_PC2__ISC_D8>,
<PIN_PC1__ISC_D7>,
<PIN_PC0__ISC_D6>,
<PIN_PB31__ISC_D5>,
<PIN_PB30__ISC_D4>;
bias-disable;
};
pinctrl_sensor_power: sensor_power {
pinmux = <PIN_PB12__GPIO>;
bias-pull-up;
};
pinctrl_sensor_reset: sensor_reset {
pinmux = <PIN_PB11__GPIO>;
bias-pull-up;
};
Use the camera from user space
Test the v4l2 API compliance of the ISC driver
sudo v4l2-compliance
Display all information available
sudo v4l2-ctl --all
Use the Microchip script to capture
Configure the media controller pipeline
sudo media-ctl -d /dev/media0 --set-v4l2 '4:0[fmt:SRGGB8_1X8/1920x1080@1/30 field:none colorspace:srgb]'
sudo media-ctl -d /dev/media0 --set-v4l2 '"atmel_isc_scaler":0[fmt:SRGGB8_1X8/1920x1080 field:none colorspace:srgb]'
sudo v4l2-ctl -d /dev/video0 -v pixelformat=RGBP,height=1080,width=1920
Capture an image:
sudo fswebcam -d /dev/video0 -i 0 -p BAYER -r 1920x1080 /var/www/html/out.jpg
Links
- Linux4Sam: UsingISC (Image Sensor Controller)
- GitHub - Video Capture AT91
- Datasheet Omnivision OV5640
- 5MP: OV5640
- ov5640.dtso
Related products
Low-power Linux System On Module
- CPU Microchip SAMA5D27
- Cortex A5 @ 500 MHz
- Low power consumption:
Suspend to RAM mode 10mW
Full speed: 396mW - Debian, Buildroot and Yocto Linux
- Fully open source drivers
Single Board Computer based on RoadRunner Linux SOM (Included)
- Low power consumption
- Two USB Host 2.0 ports (one configurable as USB client on the USB-C connector)
- One 10/100 Mbit/s Lan port
- 2 Acme Sensor ports
- Huge set of GPIOS, SPI, I2C and serial lines

Evaluation board for RoadRunner SOM
- All the circuitries you need to test the RoadRunner SOM
- USB host, USB device, Ethernet port, MicroSD socket
- Test points for power consumption measurements
- All the Roadrunner signals exposed on 2.54mm pitch pins
- On-board supercap for RTC and backup memory circuit
